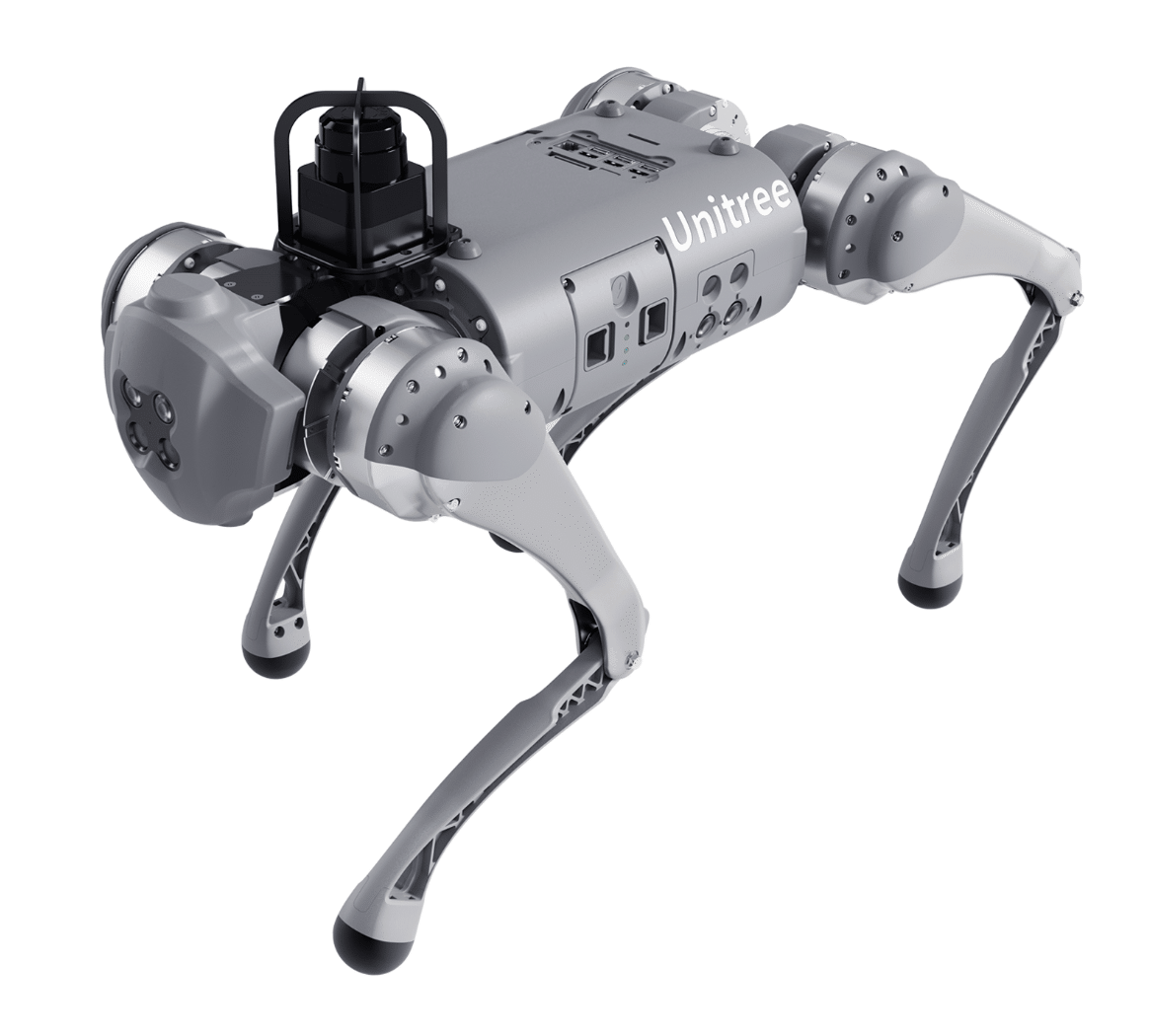
Primul robot patruped bionic inteligent de nivel consumer din lume
Sistem inteligent de urmărire laterală Bazat pe tehnologia brevetată de poziționare și control vectorial wireless:
Robotul se deplasează alături de utilizator, ceea ce este mult mai natural decât modul tradițional de urmărire. Interacțiunea om–robot este armonioasă și sigură.
Nu trebuie să îți faci griji pentru robot, deoarece este chiar lângă tine.
În medii complexe, robotul poate fi asistat pentru alegerea unei rute mai bune.
Inteligență artificială puternică integrată
Procesor: CPU cu 16 nuclee + GPU (384 nuclee, 1,5 TFLOPS).
Comparație: Nvidia TX2 are CPU cu 4 nuclee + GPU cu 256 nuclee, 1,3 TFLOPS, preț ≈468 USD.
Sistem de propulsie puternic și fiabil
Articulații noi, brevetate, ultra-ușoare.
Nivel redus de zgomot și durată de viață extinsă.
Sistem de răcire cu conducte termice integrat în motorul articulației genunchiului.
Articulații corp/coapsă: C1-8: 520 g, 23,70 N·m.
Articulație genunchi: C1-8×1,5: 35,55 N·m.
Caracteristici principale
Dinamică ridicată: 17 km/h
Sistem inteligent de urmărire laterală (ISS Smart Concomitant)
Sistem super-senzorial cu 10 unghiuri de vizualizare (SSS)
Detecție AI și recunoaștere umană
Articulații flexibile și adaptive
Autonomie mare
Dimensiuni și capacitate de încărcare
Greutate: 12 kg
Dimensiuni (pliat): 0,588 × 0,22 × 0,29 m
Sarcină adaptivă: 3–5 kg
SSS – Sistem Super-Senzorial
Acoperire vizuală:
1 set senzori binoculari fisheye, câmp vizual ≈ 150°×170°